Cross compilation Environment Setup
This section provides instructions on how to set up the cross-compilation environment for building ROS 2 applications for the Renesas RZ/V2H RDK platform.
Hardware requirements
Ubuntu 24.04 host machine.
The following image show the expected setup for cross-building applications for the RZ/V2H RDK platform:
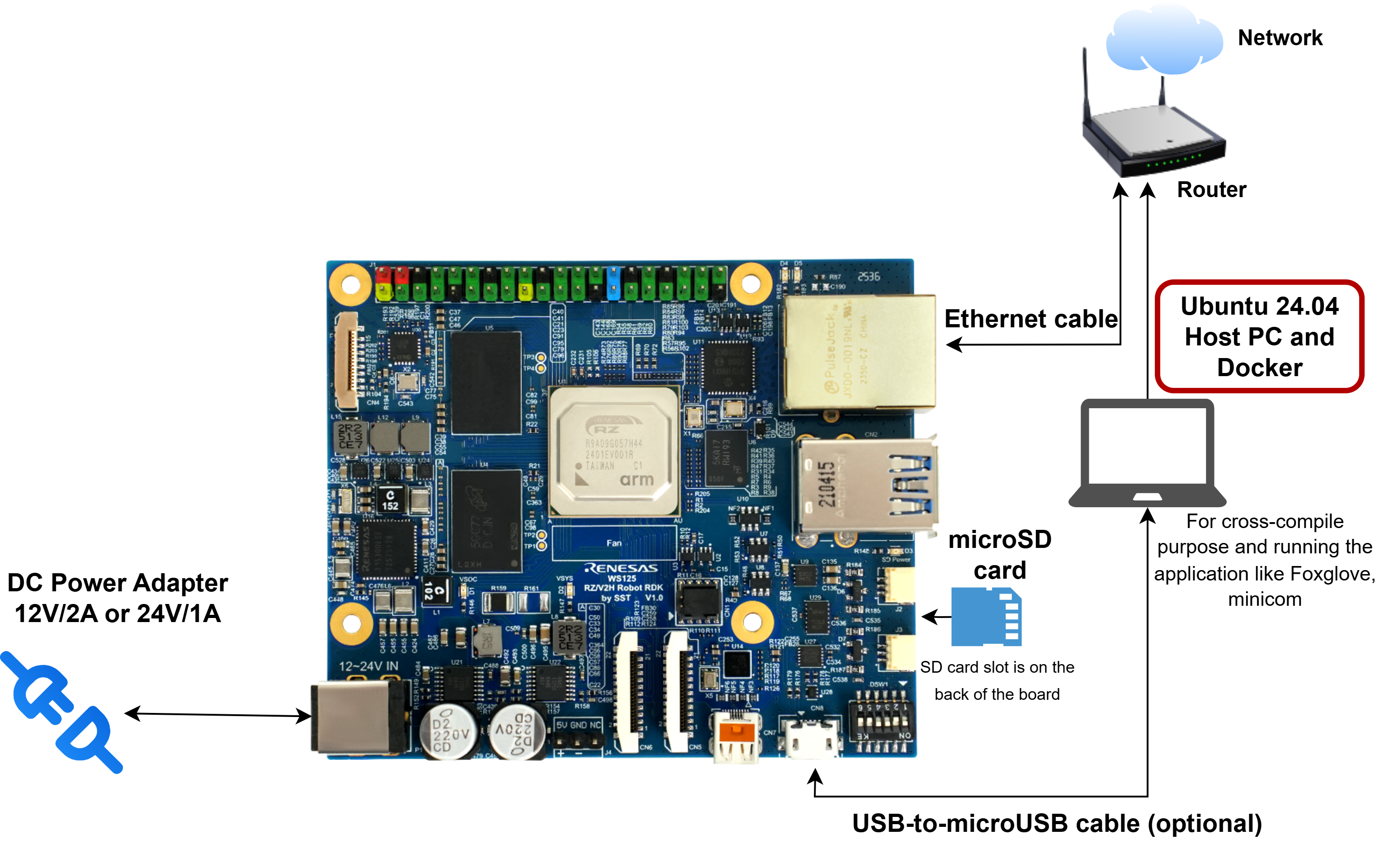
Cross Build Hardware Setup Diagram
Make sure your board and host machine are properly set up and connected to the same network to enable communication between them during development and deployment.
Software requirements on the host machine
This section describes the required software on the host machine and how to set up and access the Docker-based cross-compilation environment.
Required software
Docker installed on the host machine.
VS Code for code editing and development.
Remote - Containers extension installed in VS Code for developing inside the Docker container.
Docker environment setup
Run the setup script to create the Docker-based cross-compilation environment.
wget https://github.com/renesas-rdk/ros2_demo_workspace/raw/refs/heads/main/common_utils/setup_rdk_docker.sh chmod +x setup_rdk_docker.sh
Then run it:
./setup_rdk_docker.sh
The setup script performs the following tasks:
checks whether the Docker image already exists locally
compares the local image digest with the remote image digest when
docker buildxis availablepulls the image only if needed or if the remote image differs
creates the ROS 2 workspace mount point on the host machine
creates and starts the Docker container
optionally prepares the ROS 2 workspace inside the container
The script supports command-line options for non-interactive use:
./setup_rdk_docker.sh [platform] [options]
If you want to specify custom options, run
./setup_rdk_docker.sh --helpto see the available command-line arguments.Command-Line Options Option
Description
-i, --image IMAGEDocker image to use (default:
ghcr.io/renesas-rdk/rzv2h_ubuntu_xbuild:latest)-n, --container-name NAMEContainer name (default:
ros2_cross_build_container)-w, --workspace PATHHost ROS 2 workspace path (default:
$HOME/ros2_ws)-y, --yesNon-interactive mode; accept yes for all confirmations
--pullAutomatically pull or update the image if needed
--createAutomatically create and start the container if needed
--prepAutomatically prepare the workspace inside the container
--shellOpen a shell inside the container after setup
--no-self-updateSkip checking the remote repository for a newer script
-h, --helpShow usage information
Note
The script can be reused to create additional containers. Each container must have a unique name. If a container with the specified name already exists, the script exits with an error and suggests removing the existing container or choosing a different name.
Provide the required information when prompted.
When run without command-line options, the script asks for:
the Docker container name (default:
ros2_cross_build_container)the ROS 2 workspace path on the host machine (default:
$HOME/ros2_ws)
If you press
Enterwithout typing a value, the default value is used.Example:
Enter container name [default: ros2_cross_build_container]: Enter ROS 2 workspace path on host [default: /home/user/ros2_ws]:
The script then displays the configuration summary and asks for confirmation before proceeding.
Prepare the ROS 2 workspace inside the Docker container.
During execution, the script prompts whether to prepare the ROS 2 workspace inside the container.
This step is required the first time you use a workspace with the container and when mounting a new workspace path.
Access the Docker container from a terminal.
After the script completes, it offers to open a shell inside the container. If you decline or if the script finishes without opening a shell, access the container with:
docker exec -it <container_name> bash
Replace
<container_name>with the name you chose during setup (default:ros2_cross_build_container).Inside the container, go to your ROS 2 workspace.
cd ~/ros2_ws
Update the APT repository list in the target sysroot. This command ensures that the latest package information is available for installing dependencies.
arm64-chroot apt update
Accessing the Docker container from VS Code
After the Docker container is running, you can connect to it directly from VS Code using the Remote - Containers extension.
Open VS Code on the host machine.
Open the Command Palette
(Ctrl+Shift+P).Run Remote-Containers: Attach to Running Container…
Select
$CONTAINER_NAMEfrom the list of running containers.Once connected, open the
/home/ubuntu/ros2_wsdirectory inside the container.
This allows you to edit source files, use the integrated terminal, and work directly inside the cross-compilation environment from VS Code.
Tip
Environment variables set in the Docker container:
$ROS2_WS: Default ROS 2 workspace directory, set to/home/ubuntu/ros2_ws. You can use this variable to navigate to your ROS 2 workspace inside the container.$TOOLCHAINS_WS: Directory for cross-compilation toolchain files.