Communication Interfaces
This section provides usage examples of the communication interfaces available on this kit.
CAN-FD x2
The RZ/V2H RDK is equipped with two CAN-FD (Controller Area Network Flexible Data-Rate) ports that enable high-speed communication for automotive and industrial applications.
Note
The CAN-FD overlay is enabled by default on the RZ/V2H RDK. The overlay is controlled by the following line in
/boot/uEnv.txt:enable_overlay_can=1
To disable the overlay, add a comment symbol
#at the beginning of the line and reboot the system. To re-enable it, remove the#and reboot.By default, the RZ/V2H RDK uses the CAN-FD feature. To use the CAN with Classic CAN frames, you have to rebuild the device tree blob with the CAN-FD feature disabled.
Edit the rzv2h-rdk-1.0-can.dts file, add the
renesas,no-can-fd;property to the CAN nodes, and then rebuild the device tree blob.&canfd { pinctrl-0 = <&can0_pins &can3_pins>; pinctrl-names = "default"; status = "okay"; renesas,no-can-fd; channel0 { status = "okay"; }; channel3 { status = "okay"; }; };
Tip
To use the CAN-FD interfaces, ensure that you have the required CAN cable connectors.
We recommend using the Bus cable with 1 female connector, 3 contacts, 1.0 mm pitch, 10 cm length.
The RZ/V2H RDK is equipped with an onboard CAN transceiver (TCAN1046VDMTRQ1) and an integrated 120 Ω termination resistor, eliminating the need for any external CAN transceiver circuitry.
Connect the CAN-FD ports to your CAN network using appropriate connectors and cables. Connect the CAN-H and CAN-L lines accordingly.
The following image shows the pinout for the CAN-FD ports on the RZ/V2H RDK:
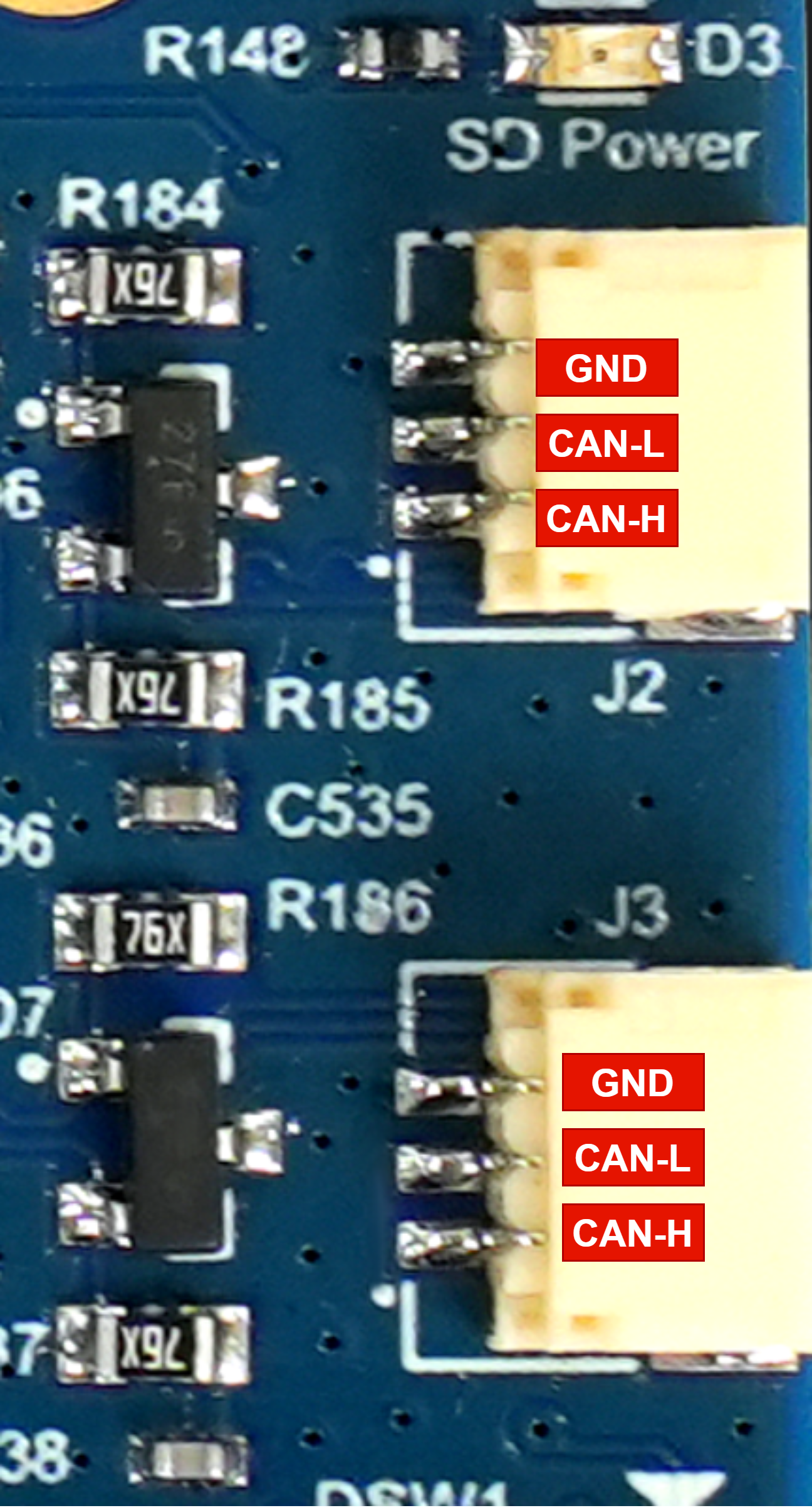
RZ/V2H RDK CAN-FD Port Pinout
Follow the steps below to use the CAN-FD interfaces on the RZ/V2H RDK running Ubuntu.
This example is applied for testing CAN-FD feature only, it does not cover the configuration for Classic CAN frames.
Verify that the CAN interfaces are recognized:
ip link show | grep can
Example output:
5: can0: <NOARP,ECHO> mtu 72 qdisc noop state DOWN mode DEFAULT group default qlen 10 link/can
6: can1: <NOARP,ECHO> mtu 72 qdisc noop state DOWN mode DEFAULT group default qlen 10 link/can
Bring up the CAN0 and CAN1 interfaces (for example, 500 kbps nominal, 2 Mbps data):
# Bring up the CAN0 interface with the specified bitrate and data bitrate for CAN-FD
sudo ip link set can0 down
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can0 up
# Bring up the CAN1 interface with the specified bitrate and data bitrate for CAN-FD
sudo ip link set can1 down
sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can1 up
Check the interface status:
ip -details link show can0
ip -details link show can1
Send and receive CAN messages:
You can use the can-utils package for testing CAN-FD communication.
Install
can-utilsif it is not already installed:sudo apt install can-utils
Connect the CAN0_H to CAN1_H and CAN0_L to CAN1_L.
In one terminal, listen for incoming CAN-FD frames:
candump can0In another terminal, send a test frame:
cansend can1 123##01122334455667788
RasPi GPIO 40-pin Header
The Raspberry Pi GPIO 40-pin header on the RZ/V2H RDK provides a versatile interface for connecting various peripherals and expansion boards compatible with the Raspberry Pi pin layout. This header includes multiple communication protocols such as I2C, SPI, UART, GPIO, and PCM.
The following communication protocols are supported:
I2C (Inter-Integrated Circuit)
SPI (Serial Peripheral Interface)
UART (Universal Asynchronous Receiver/Transmitter)
GPIO (General Purpose Input/Output)
PCM (Pulse Code Modulation)
Pin Out Diagram
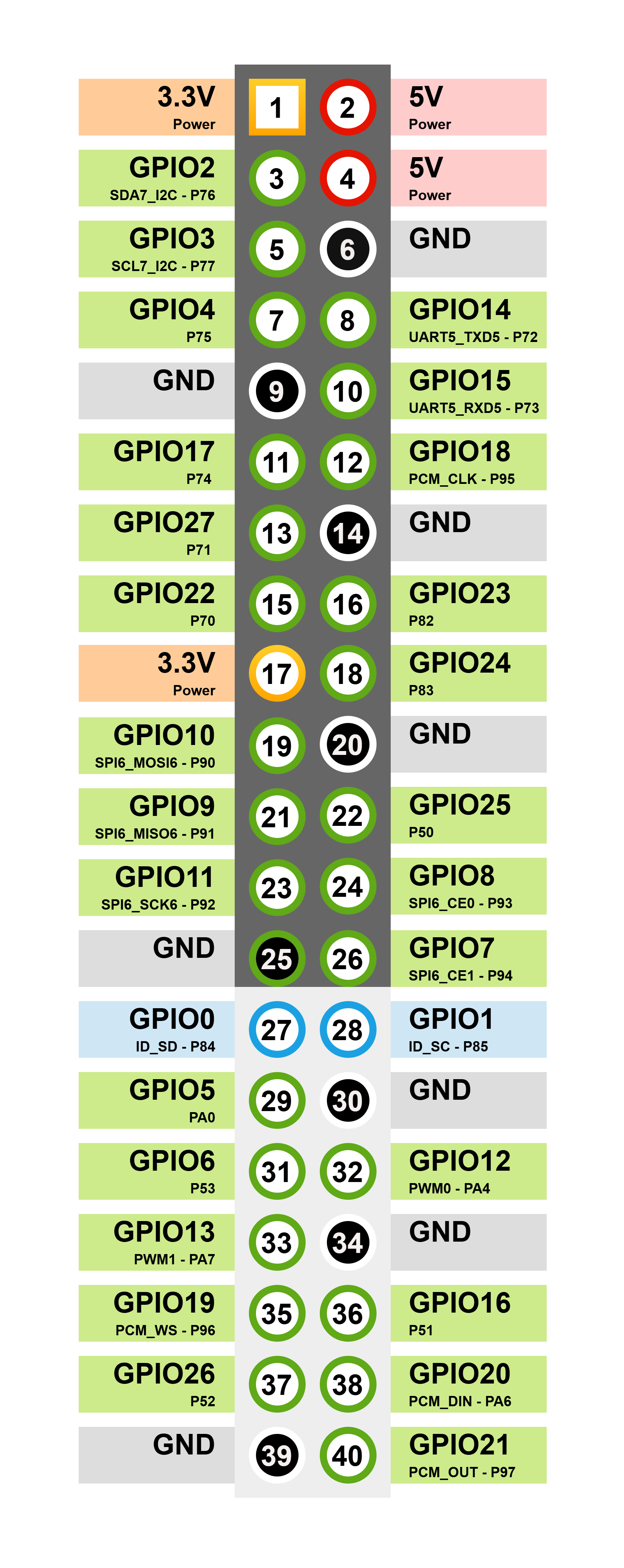
RZ/V2H RDK Raspberry Pi GPIO 40-pin Header Pin Out
I2C (Inter-Integrated Circuit)
Note
Before using the I2C interface from the 40-pin header, update the device tree source file (rzv2h-rdk-ver1.dts) by changing the &rsci_i2c7 node status from disabled to okay.
Then rebuild the device tree blob and copy the updated blob to the /boot/dtb/renesas/ directory on the target board.
Besides, do not enable #enable_overlay_audio_codec=1, as it uses I2C7 for the audio codec.
The I2C interface allows communication with multiple slave devices using just two wires: SDA (data line) and SCL (clock line).
It is commonly used for connecting sensors, displays, and other peripherals.
On the RZ/V2H RDK, the I2C pins are located on the Raspberry Pi GPIO 40-pin header as follows:
Pin Name |
Function |
Description |
|---|---|---|
P76 - GPIO2 - Pin number 3 |
SDA7 |
I2C7 data line - Serial Data (connected with 2.2K pull-up resistor). |
P77 - GPIO3 - Pin number 5 |
SCL7 |
I2C7 clock line - Serial Clock (connected with 2.2K pull-up resistor). |
Usage example with i2c-tools
First, install the i2c-tools package if it is not already installed:
sudo apt install i2c-tools
List all I2C buses available on the system:
i2cdetect -l
Example output:
i2c-3 i2c Renesas RIIC adapter I2C adapter
i2c-4 i2c Renesas RIIC adapter I2C adapter
i2c-8 i2c Renesas RIIC adapter I2C adapter
i2c-9 i2c Renesas RSCI I2C adapter I2C adapter
i2c-10 i2c Renesas RSCI I2C adapter I2C adapter
Find the correct bus number for I2C7:
ls -l /sys/class/i2c-dev/
Example output:
total 0
lrwxrwxrwx 1 root root 0 Jul 12 01:53 i2c-10 -> ../../devices/platform/soc/12802800.i2c/i2c-10/i2c-dev/i2c-10
lrwxrwxrwx 1 root root 0 Jul 12 01:53 i2c-3 -> ../../devices/platform/soc/14401000.i2c/i2c-3/i2c-dev/i2c-3
lrwxrwxrwx 1 root root 0 Jul 12 01:53 i2c-4 -> ../../devices/platform/soc/14401400.i2c/i2c-4/i2c-dev/i2c-4
lrwxrwxrwx 1 root root 0 Jul 12 01:53 i2c-8 -> ../../devices/platform/soc/11c01000.i2c/i2c-8/i2c-dev/i2c-8
lrwxrwxrwx 1 root root 0 Jul 12 01:53 i2c-9 -> ../../devices/platform/soc/12802400.i2c/i2c-9/i2c-dev/i2c-9
In this example, I2C7 corresponds to bus number 10.
Hint
How to identify the correct I2C bus number for I2C7?
You can identify the correct I2C bus number by checking the device tree source (DTS) file for the RZ/V2H RDK or by referring to the system documentation.
In this case, the device tree of the RZ/V2H RDK defines the I2C7 interface as 12802800.i2c, which is mapped to I²C bus number 10.
Scan for I2C devices on bus 10:
sudo i2cdetect -y 10
SPI (Serial Peripheral Interface)
The SPI interface enables high-speed communication with peripheral devices using a master-slave architecture. It uses separate lines for data in, data out, clock, and chip select.
On the RZ/V2H RDK, the SPI pins are located on the Raspberry Pi GPIO 40-pin header as follows:
Pin Name |
Function |
Description |
|---|---|---|
P93 - GPIO8 - Pin number 24 |
CE0 |
Slave Select 0 signal for SPI6. |
P94 - GPIO7 - Pin number 26 |
CE1 |
Slave Select 1 signal for SPI6. |
P90 - GPIO10 - Pin number 19 |
MOSI6 |
Master Out Slave In (data output from the master). |
P91 - GPIO9 - Pin number 21 |
MISO6 |
Master In Slave Out (data input to the master). |
P92 - GPIO11 - Pin number 23 |
SCK6 |
Serial Clock signal for SPI6. |
Usage example
List SPI devices:
ls /dev/spidev*
Example output:
/dev/spidev1.0
Install the spi-tools package if it is not already installed:
sudo apt install spi-tools
Test SPI communication (connect an appropriate SPI device for testing):
For this test, we will short the MOSI and MISO lines (P90 and P91) to create a loop-back connection. This allows us to verify that data sent from the master (MOSI) is correctly received back on the MISO line.
spi-config -d /dev/spidev1.0 -q
echo -n -e "1234567890" | spi-pipe -d /dev/spidev1.0 -s 10000000 | hexdump
Example output:
/dev/spidev1.0: mode=0, lsb=0, bits=8, speed=2000000, spiready=0
0000000 3231 3433 3635 3837 3039
000000a
UART (Universal Asynchronous Receiver/Transmitter)
The UART interface provides serial communication capabilities, allowing data exchange between the RZ/V2H RDK and other devices such as micro-controllers, GPS modules, or serial consoles.
On the RZ/V2H RDK, the UART pins are located on the Raspberry Pi GPIO 40-pin header as follows:
Pin Name |
Function |
Description |
|---|---|---|
P72 - GPIO14 - Pin number 8 |
TXD5 |
UART5 transmit data (TX) signal. |
P73 - GPIO15 - Pin number 10 |
RXD5 |
UART5 receive data (RX) signal. |
Usage example with minicom
First, connect the UART5 pins (P72 and P73) to a USB-UART adapter to establish a serial connection with a host computer.
Install the minicom package if it is not already installed:
sudo apt install minicom
List available serial ports:
ls /dev/ttySC*
Example output:
/dev/ttySC0 /dev/ttySC1
Open a serial connection using minicom (replace /dev/ttySC1 with the appropriate device):
Tip
How to identify the correct UART port for UART5?
You can identify the correct UART port by checking the device tree source (DTS) file for the RZ/V2H RDK or by referring to the system documentation.
ls -l /sys/class/tty/ | grep ttySC
lrwxrwxrwx 1 root root 0 Jul 12 01:53 ttySC0 -> ../../devices/platform/soc/11c01400.serial/11c01400.serial:0/11c01400.serial:0.0/tty/ttySC0
lrwxrwxrwx 1 root root 0 Jul 12 01:53 ttySC1 -> ../../devices/platform/soc/12802000.serial/12802000.serial:0/12802000.serial:0.0/tty/ttySC1
In this case, the device tree of the RZ/V2H RDK defines the UART5 interface as 12802000.serial, which is mapped to /dev/ttySC1.
sudo minicom -D /dev/ttySC1 -b 115200
Open and configure the serial console (baud rate: 115200) on the host computer to interact with the RZ/V2H RDK through the UART interface.
Enable echoing of typed characters in minicom by pressing Ctrl-A followed by E.
Press Ctrl-A, then U, to toggle the option that adds a carriage return (CR) to each incoming linefeed (LF) character received from the remote device.
When you type in the minicom terminal, the characters are sent to the host computer through the UART5 interface on the RZ/V2H RDK.
Similarly, any data sent from the RZ/V2H RDK through the UART5 interface is displayed in the minicom terminal on the host computer.
GPIO (General Purpose Input/Output)
The GPIO pins allow digital input and output operations, enabling interaction with various sensors, actuators, and other electronic components.
Refer to the RZ/V2H RDK GPIO pinout documentation for detailed information on each GPIO pin’s capabilities and functions.
Usage example with gpiod
First, install the gpiod package if it is not already installed:
sudo apt install gpiod
List available GPIO chips:
gpiodetect
List lines for a specific GPIO chip (for example, gpiochip1):
gpioinfo gpiochip1
Set a GPIO line as output and change its value:
# Set GPIO line 92 high - turn on LED D4
gpioset --mode=signal gpiochip1 92=1
Read the value of a GPIO line:
gpioget gpiochip1 92
PCM (Pulse Code Modulation)
Note
The PCM interface is not enabled by default on the RZ/V2H RDK.
To use the PCM interface, enable the device tree overlay for PCM in
boot/uEnv.txt, then reboot the system.
Uncomment the enable_overlay_audio_codec line in boot/uEnv.txt
so it reads as follows:
# Remove the comment from the line below to enable the PCM audio codec overlay
enable_overlay_audio_codec=1
If this overlay is enabled, the audio line from micro HDMI will be routed to the PCM interface, allowing you to use the PCM pins for audio data transmission.
Warning
The PCM interface and the micro HDMI audio output cannot be used at the same time. Enabling the PCM overlay disables audio output through micro HDMI.
The PCM interface is used for audio data transmission, allowing the RZ/V2H RDK to connect with audio codecs and other audio peripherals.
On the RZ/V2H RDK, the PCM pins are located on the Raspberry Pi GPIO 40-pin header as follows:
Pin Name |
Function |
Description |
|---|---|---|
PA6 - GPIO20 - Pin number 38 |
PCM_DIN |
PCM data input (from external audio device to the RZ/V2H). |
P97 - GPIO21 - Pin number 40 |
PCM_OUT |
PCM data output (from the RZ/V2H to the external audio device). |
P96 - GPIO19 - Pin number 35 |
PCM_WS |
PCM word select (frame sync) signal. |
P95 - GPIO18 - Pin number 12 |
PCM_CLK |
PCM bit clock signal. |
P51 - GPIO16 - Pin number 36 |
Interrupt signal for the external audio codec. |
|
P76 - GPIO2 - Pin number 3 |
SDA7 |
I2C data line for the external audio codec. |
P77 - GPIO3 - Pin number 5 |
SCL7 |
I2C clock line for the external audio codec. |
Usage Example: DA7219 Performance Board
Use the PCM interface with an external audio codec such as the DA7219 Performance Board to enable audio input and output capabilities on the RZ/V2H RDK.
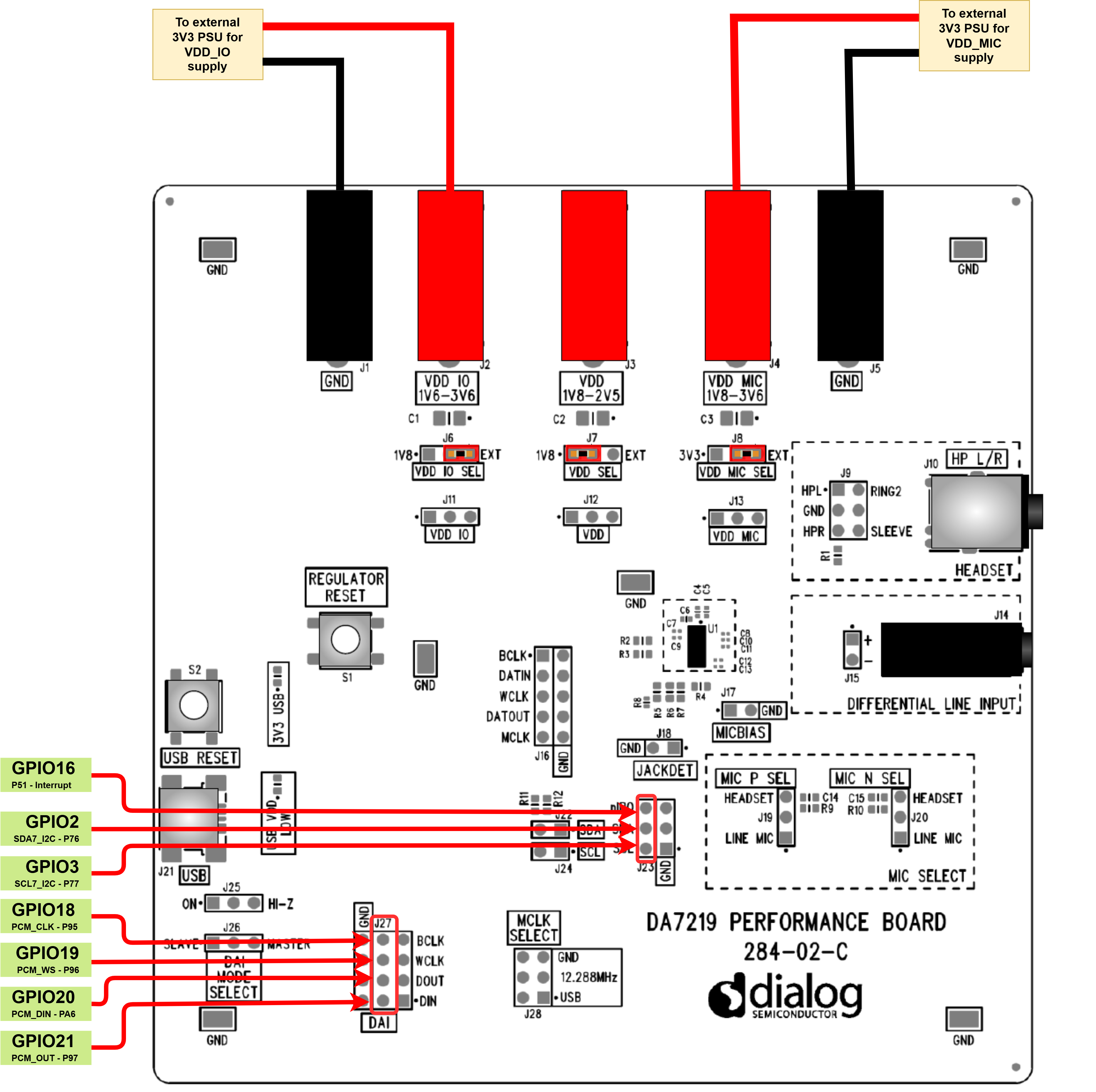
DA7219 Performance Board connected to the RZ/V2H RDK
Install the required audio utilities if they are not already installed:
sudo apt install alsa-utils
Use the following commands to test audio input and output through the PCM interface with the DA7219 Performance Board:
aplay -l # List audio playback devices
arecord -l # List audio capture devices
aplay -L # List all supported PCM devices and formats